
Figure 1: Our approach (PDDM) can efficiently and effectively learn complex
dexterous manipulation skills in both simulation and the real world. Here, the
learned model is able to control the 24-DoF Shadow Hand to rotate two
free-floating Baoding balls in the palm, using just 4 hours of real-world data
with no prior knowledge/assumptions of system or environment dynamics.
Dexterous manipulation with multi-fingered hands is a grand challenge in
robotics: the versatility of the human hand is as yet unrivaled by the
capabilities of robotic systems, and bridging this gap will enable more general
and capable robots. Although some real-world tasks (like picking up a
television remote or a screwdriver) can be accomplished with simple parallel
jaw grippers, there are countless tasks (like functionally using the remote to
change the channel or using the screwdriver to screw in a nail) in which
dexterity enabled by redundant degrees of freedom is critical. In fact,
dexterous manipulation is defined as being object-centric, with the goal
of controlling object movement through precise control of forces and motions
— something that is not possible without the ability to simultaneously impact
the object from multiple directions. For example, using only two fingers to
attempt common tasks such as opening the lid of a jar or hitting a nail with a
hammer would quickly encounter the challenges of slippage, complex contact
forces, and underactuation. Although dexterous multi-fingered hands can indeed
enable flexibility and success of a wide range of manipulation skills, many of
these more complex behaviors are also notoriously difficult to control: They
require finely balancing contact forces, breaking and reestablishing contacts
repeatedly, and maintaining control of unactuated objects. Success in such
settings requires a sufficiently dexterous hand, as well as an intelligent
policy that can endow such a hand with the appropriate control strategy. We
study precisely this in our work on Deep Dynamics Models for Learning Dexterous
Manipulation.
Continue
Kourosh Hakhamaneshi
Sep 26, 2019
In this post, we share some recent promising results regarding the applications
of Deep Learning in analog IC design. While this work targets a specific
application, the proposed methods can be used in other black box optimization
problems where the environment lacks a cheap/fast evaluation procedure.

So let’s break down how the analog IC design process is usually done, and then
how we incorporated deep learning to ease the flow.
Continue
Adam Stooke
Sep 24, 2019
UPDATE (15 Feb 2020): Documentation is now available for rlpyt! See it at
rlpyt.readthedocs.io. It describes program flow, code organization, and
implementation details, including class, method, and function references for
all components. The code examples still introduce ways to run experiments, and
now the documentation is a more in-depth resource for researchers and
developers building new ideas with rlpyt.
Since the advent of deep reinforcement learning for game play in 2013, and
simulated robotic control shortly after, a multitude of new algorithms
have flourished. Most of these are model-free algorithms which can be
categorized into three families: deep Q-learning, policy gradients, and Q-value
policy gradients. Because they rely on different learning paradigms, and
because they address different (but overlapping) control problems,
distinguished by discrete versus continuous action sets, these three families
have developed along separate lines of research. Currently, very few if any
code bases incorporate all three kinds of algorithms, and many of the original
implementations remain unreleased. As a result, practitioners often must
develop from different starting points and potentially learn a new code base
for each algorithm of interest or baseline comparison. RL researchers must
invest time reimplementing algorithms–a valuable individual exercise but one
which incurs redundant effort across the community, or worse, one that presents
a barrier to entry.
Yet these algorithms share a great depth of common reinforcement learning
machinery. We are pleased to share rlpyt, which leverages this commonality
to offer all three algorithm families built on a shared, optimized
infrastructure, in one repository. Available from BAIR at
https://github.com/astooke/rlpyt, it contains modular implementations of
many common deep RL algorithms in Python using Pytorch, a leading deep learning
library. Among numerous existing implementations, rlpyt is a more
comprehensive open-source resource for researchers.
Continue
We introduce Bit-Swap, a scalable and effective lossless data compression
technique based on deep learning. It extends previous work on practical
compression with latent variable models, based on bits-back coding and
asymmetric numeral systems. In our experiments Bit-Swap is able to beat
benchmark compressors on a highly diverse collection of images. We’re releasing
code for the method and optimized models such that people can explore and
advance this line of modern compression ideas. We also release a demo and
a pre-trained model for Bit-Swap image compression and decompression on your
own image. See the end of the post for a talk that covers how bits-back coding
and Bit-Swap works.
Continue
Nicholas Carlini
Aug 13, 2019
It is important whenever designing new technologies to ask “how will this
affect people’s privacy?” This topic is especially important with regard to
machine learning, where machine learning models are often trained on sensitive
user data and then released to the public. For example, in the last few years
we have seen models trained on users’ private emails, text
messages,
and medical records.
This article covers two aspects of our upcoming USENIX Security
paper that investigates to what extent
neural networks memorize rare and unique aspects of their training data.
Specifically, we quantitatively study to what extent following
problem actually occurs in practice:
Continue
To operate successfully in a complex and changing environment, learning agents must be able to acquire new skills quickly.
Humans display remarkable
skill in this area — we can learn to recognize a new object from one example,
adapt to driving a different car in a matter of minutes, and add a new slang
word to our vocabulary after hearing it once. Meta-learning is a promising
approach for enabling such capabilities in machines. In this paradigm, the
agent adapts to a new task from limited data by leveraging a wealth of
experience collected in performing related tasks. For agents that must take
actions and collect their own experience, meta-reinforcement learning (meta-RL)
holds the promise of enabling fast adaptation to new scenarios. Unfortunately,
while the trained policy can adapt quickly to new tasks, the meta-training
process requires large amounts of data from a range of training tasks,
exacerbating the sample inefficiency that plagues RL algorithms. As a result,
existing meta-RL algorithms are largely feasible only in simulated
environments. In this post, we’ll briefly survey the current landscape of
meta-RL and then introduce a new algorithm called PEARL that drastically
improves sample efficiency by orders of magnitude. (Check out the research paper and the code.)
Continue
Daniel Ho, Eric Liang, Richard Liaw
Jun 7, 2019
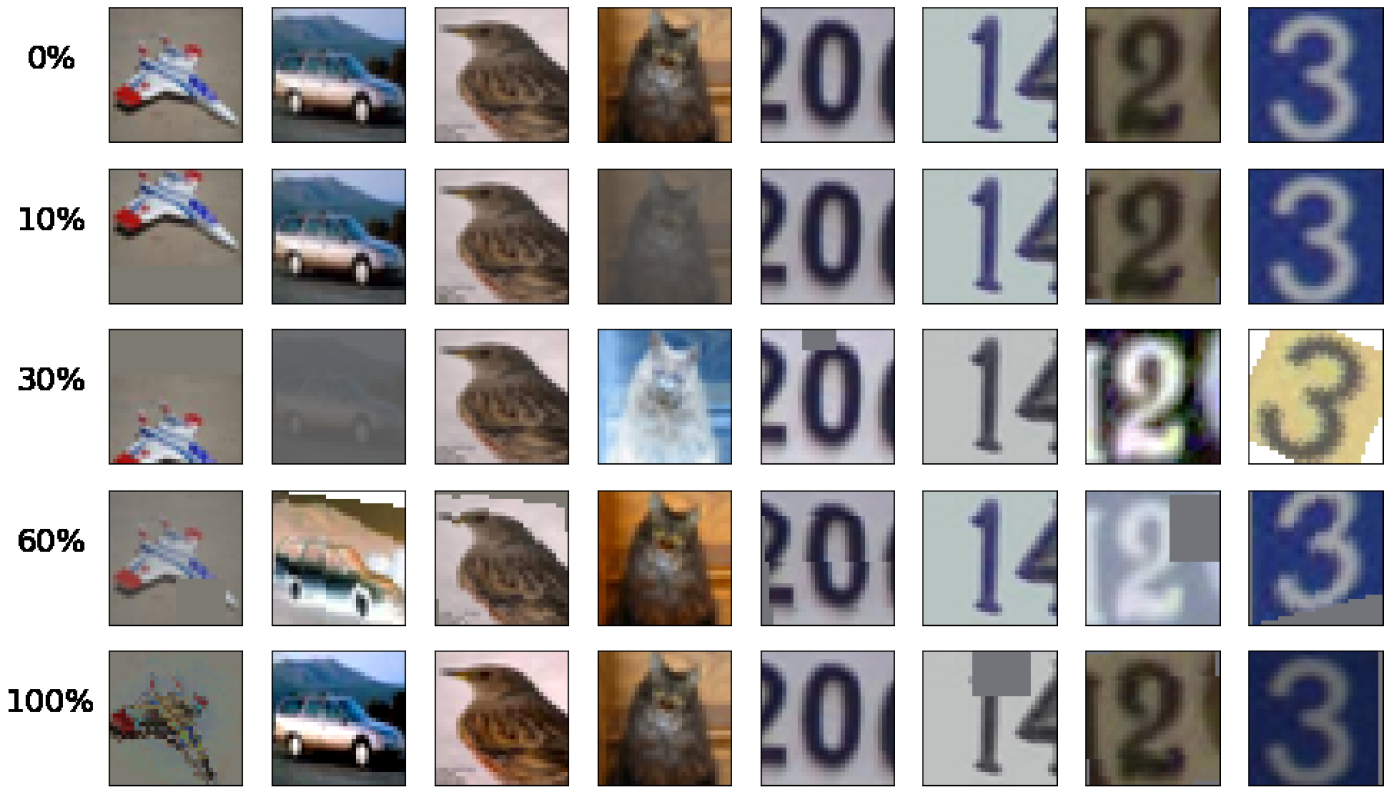
Effect of Population Based Augmentation applied to images, which differs at different percentages into training.
In this blog post we introduce Population Based Augmentation (PBA), an
algorithm that quickly and efficiently learns a state-of-the-art approach to
augmenting data for neural network training. PBA matches the previous best
result on CIFAR and SVHN but uses one thousand times less
compute, enabling researchers and practitioners to effectively learn
new augmentation policies using a single workstation GPU. You can use PBA
broadly to improve deep learning performance on image recognition tasks.
We discuss the PBA results from our recent paper and then show how
to easily run PBA for yourself on
a new data set in the Tune framework.
Continue
Eugene Vinitsky
Jun 3, 2019
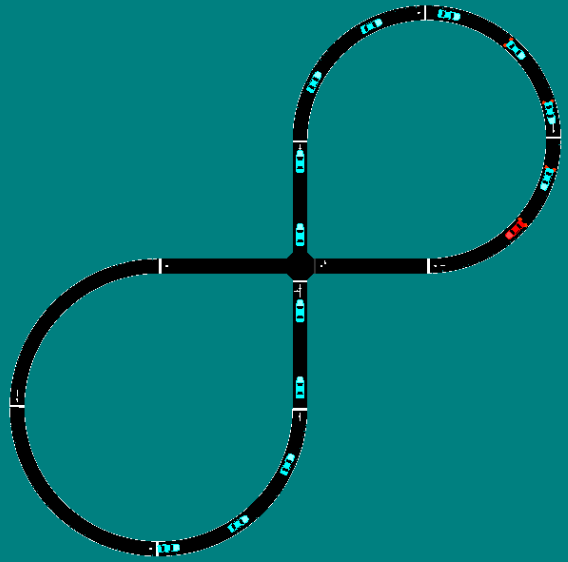
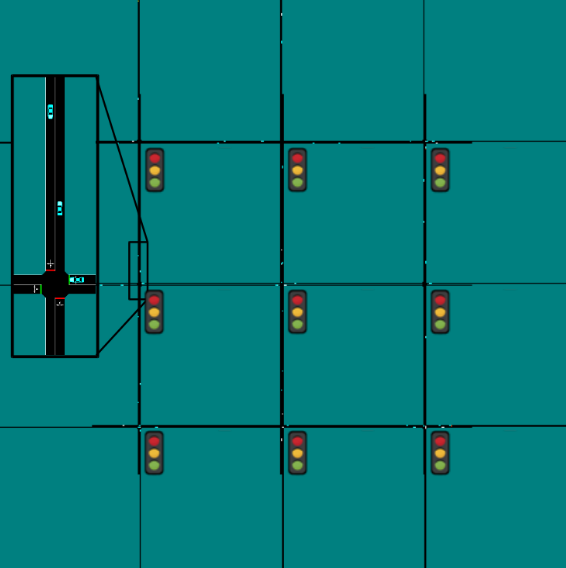
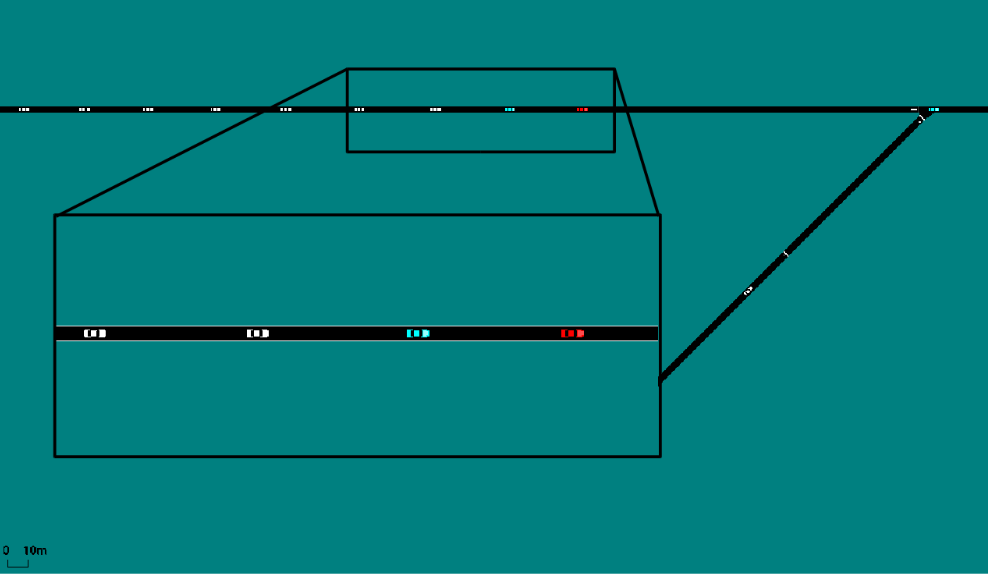

We are in the midst of an unprecedented convergence of two rapidly growing
trends on our roadways: sharply increasing congestion and the deployment of
autonomous vehicles. Year after year, highways get slower and slower: famously,
China’s roadways were paralyzed by a two-week long traffic jam in 2010. At the
same time as congestion worsens, hundreds of thousands of semi-autonomous
vehicles (AVs), which are vehicles with automated distance and lane-keeping
capabilities, are being deployed on highways worldwide. The second trend offers
a perfect opportunity to alleviate the first. The current generation of AVs,
while very far from full autonomy, already hold a multitude of advantages over
human drivers that make them perfectly poised to tackle this congestion. Humans
are imperfect drivers: accelerating when we shouldn’t, braking aggressively,
and make short-sighted decisions, all of which creates and amplifies patterns
of congestion.
Continue
Communicating the goal of a task to another person is easy: we can use language, show them an image of the desired outcome, point them to a how-to video, or use some combination of all of these. On the other hand, specifying a task to a robot for reinforcement learning requires substantial effort. Most prior work that has applied deep reinforcement learning to real robots makes uses of specialized sensors to obtain rewards or studies tasks where the robot’s internal sensors can be used to measure reward. For example, using thermal cameras for tracking fluids, or purpose-built computer vision systems for tracking objects. Since such instrumentation needs to be done for any new task that we may wish to learn, it poses a significant bottleneck to widespread adoption of reinforcement learning for robotics, and precludes the use of these methods directly in open-world environments that lack this instrumentation.
We have developed an end-to-end method that allows robots to learn from a modest number of images that depict successful completion of a task, without any manual reward engineering. The robot initiates learning from this information alone (around 80 images), and occasionally queries a user for additional labels. In these queries, the robot shows the user an image and asks for a label to determine whether that image represents successful completion of the task or not. We require a small number of such queries (around 25-75), and using these queries, the robot is able to learn directly in the real world in 1-4 hours of interaction time, resulting in one of the most efficient real-world image-based robotic RL methods. We have open-sourced our implementation.

Our method allows us to solve a host of real world robotics problems from pixels in an end-to-end fashion without any hand-engineered reward functions.
Continue
Imagine a robot trying to learn how to stack blocks and push objects using
visual inputs from a camera feed. In order to minimize cost and safety
concerns, we want our robot to learn these skills with minimal interaction
time, but efficient learning from complex sensory inputs such as images is
difficult. This work introduces SOLAR, a
new model-based reinforcement learning (RL) method that can learn skills –
including manipulation tasks on a real Sawyer robot arm – directly from
visual inputs with under an hour of interaction. To our knowledge, SOLAR is the
most efficient RL method for solving real world image-based robotics tasks.
Our robot learns to stack a Lego block and push a mug onto a coaster with only
inputs from a camera pointed at the robot. Each task takes an hour or less of
interaction to learn.
Continue